3D Acquisition
After a sensor system has been set up and is running, it is ready to start capturing 3D data.
Laser profile sensors project a laser line onto the target.
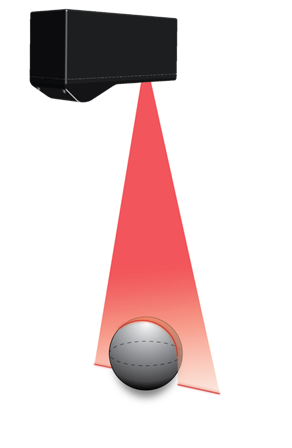
The sensor's camera views the laser line on the target from an angle and captures the reflection of the laser light off the target.

Target objects typically move on a conveyor belt or other transportation mechanism under a sensor mounted in a fixed position. Sensors can also be mounted on robot arms and moved over the target. In both cases, the sensor captures a series of 3D profiles, building up a full scan of the target. Sensor speed and required exposure time to measure the target are typically critical factors in applications with line profile sensors.

|
|