Feature Robot Pose
The Feature Robot Pose tool takes geometric features as input and outputs positional and rotational values. You can use these values in a robot system to control the robot.
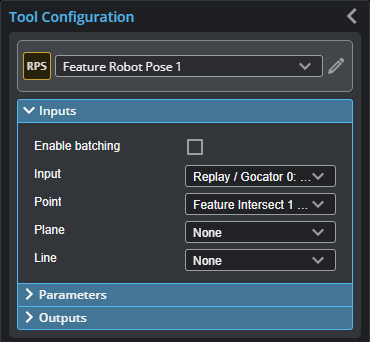
Inputs

|
To use a measurement as an anchor, it must be enabled and properly configured in the tool providing the anchor. For more information on anchoring, see Measurement Anchoring. |
| Name | Description |
|---|---|
| Enable Batching |
When Enable Batching is checked, the tool takes an array as input and processes each element in the array individually. For more information on arrays, batching, and aggregating, see Arrays, Batching, and Aggregation. |
|
Input |
The data the tool applies measurements to or processes. |
|
Point |
The Point geometric feature the tool extracts the X, Y, and Z measurements from. This input is required. |
|
Plane |
The Plane geometric feature the tool extracts the Roll and Pitch measurements from. This input is optional. If you omit it, the tools uses the XY plane for calculations. |
|
Line |
The Line geometric feature the tool extracts the Yaw measurement from. This input is optional. If you omit it, the tool uses the X axis for calculations. |
For information on adding, managing, and removing tools, as well as detailed descriptions of settings common to most tools, see Tool Configuration.
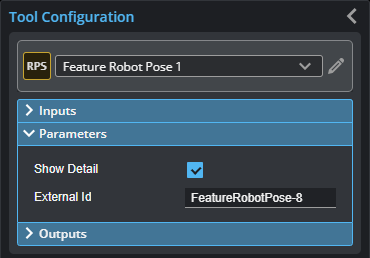
Parameters
The following parameters are in the expandable Parameters section in the tool's configuration.
| Parameter | Description |
|---|---|
| Show Detail | Toggles the display of additional visualizations in the data viewer. |
|
External ID |
The external ID of the tool that appears in GoHMI Designer. For more information, see GoHMI and GoHMI Designer. |
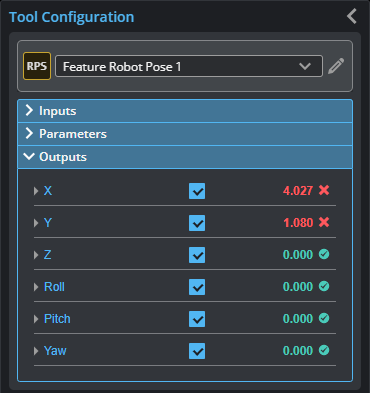
Outputs
All tools provide measurements, geometric features, or data as outputs.
| Measurement | Illustration |
|---|---|
|
X, Y, Z The X, Y, and Z positions of the Point geometric feature. |
|
|
Roll, Pitch, Yaw The rotational angles of the Plane and Line geometric feature. |