Configuring Motion
If your sensor system includes a transport system such as a conveyor, to produce accurate scans, you should configure the settings in the Motion section on the System > Alignment page. Although GoPxL lets you automatically configure motion settings during the sensor alignment routine (for more information, see Aligning Sensors), it's more accurate to manually enter the encoder resolution or travel speed values provided by the manufacturer of your transport system or its components.
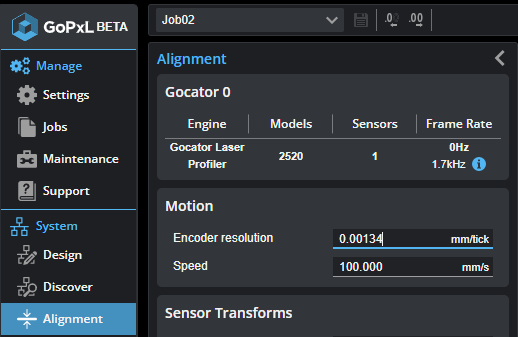
If your transport system includes an encoder, you should configure Encoder Resolution. If your transport system does not include an encoder (or if it does and you need to temporarily use time-based triggering for testing purposes), you should configure Speed.
Setting Encoder Resolution
Encoder resolution is expressed in millimeters per tick, where one tick corresponds to one of the four encoder quadrature signals (A+ / A- / B+ / B-).

|
Encoders are normally specified in pulses per revolution, where each pulse is made up of the four quadrature signals (A+ / A- / B+ / B-). Because the sensor reads each of the four quadrature signals, you should choose an encoder accordingly, given the resolution required for your application. |
Setting Travel Speed
Set the value of the Speed setting to correctly scale scans in the direction of travel in systems that lack an encoder but have a conveyor system that is controlled to move at constant speed. Travel speed is expressed in millimeters per second.