Surface Hole
The Hole tool measures a circular opening within a region of interest on the surface and returns its position and radius.

|
The tool does not search for or detect the feature. The tool expects that the feature, conforming reasonably well to the defined parameters, is present and that it is on a sufficiently uniform background. |
The hole can be on a surface at an angle to the sensor.
The tool uses a complex feature-locating algorithm to find a hole and then return measurements. For a detailed explanation of the algorithm, see Hole Algorithm. The behavior of the algorithm can be adjusted by changing the tool's parameters.
For information on adding, managing, and removing tools, as well as detailed descriptions of settings common to most tools, see Tool Configuration.
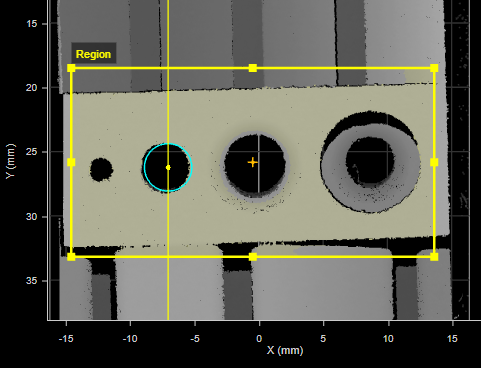
Measurement Region
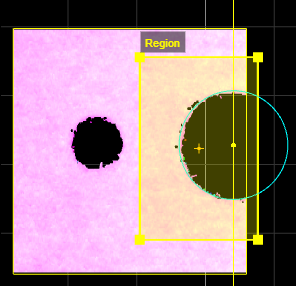
The center of the hole must be inside the measurement region, even if the Partial Detection option is enabled. Either of the following is acceptable.

Hole Algorithm
The Hole tool processes the data in three phases: Search, Measure, and Filter. The algorithm can separate out background information that appears inside the hole. It can also detect holes that only partially appear in the data.
See the tool's parameters for an explanation of the options that affect the tool's algorithm.
Search phase - The tool searches for coarse data transitions (edge data) and performs a coarse fitting of the hole model (specified by the orientation angles and the nominal value) to determine the most likely candidate. If Tilt Correction is set to Autoset, the algorithm uses the data within the measurement region to estimate the orientation of the part.
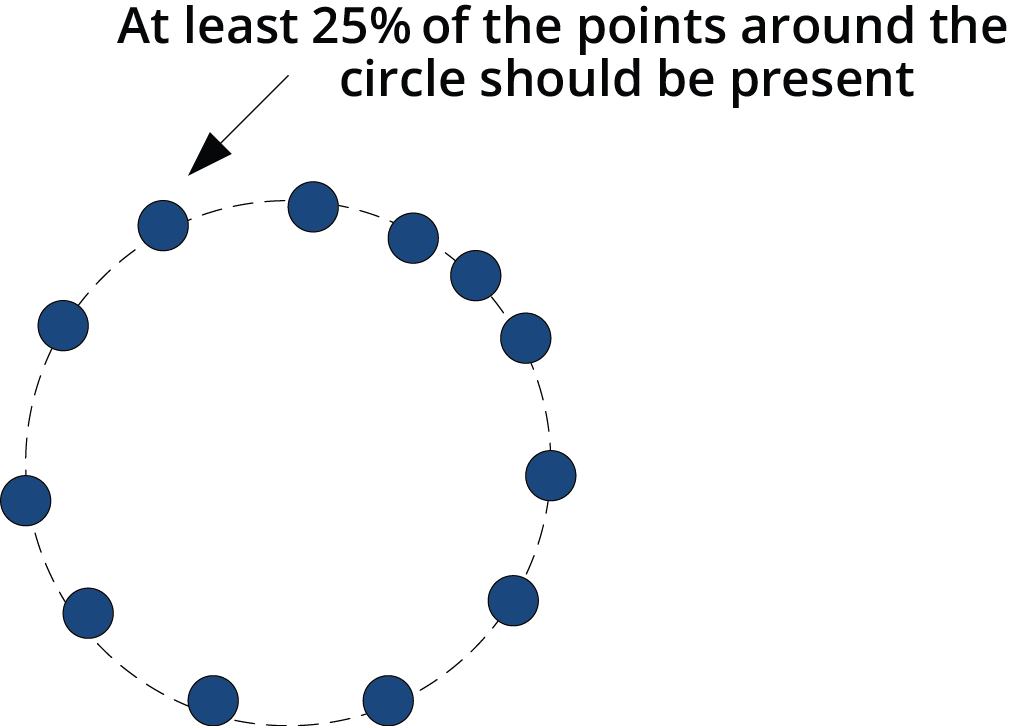
Measure phase - A more rigorous edge detection algorithm is applied to precisely determine the edges around the feature. Edge detection at this stage will reject outliers and noise. The algorithm requires at least 25% of the data around the hole for the candidate to remain valid.
The accuracy of the algorithm improves when the points are spread more evenly along the hole's circumference.
The set of refined edges is then used to locate and inspect the feature. If the Reference Regions option is enabled and set to AutoSet, the edges are also used to calculate the location of the reference regions.
Filter phase - The detected location and dimensions are then compared to the nominal and tolerance settings. If the refined feature falls within the measurement region and its measurements fit within the specified tolerance, the results are reported. If not, an invalid result is returned.
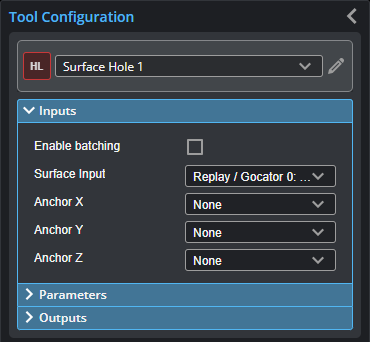
Inputs
You configure the tool's inputs in the expandable Inputs section.
|
|
To use a measurement as an anchor, it must be enabled and properly configured in the tool providing the anchor. For more information on anchoring, see Measurement Anchoring. |
| Name | Description |
|---|---|
| Enable Batching |
For more information on arrays, batching, and aggregating, see Arrays, Batching, and Aggregation. |
|
Surface Input |
The data the tool applies measurements to or processes. |
|
Anchor X Anchor Y Anchor Z |
The X, Y, or Z measurement of another tool that this tool uses as a positional anchor. Positional anchors are optional. |
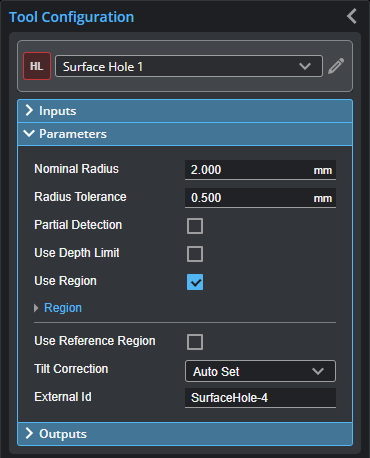
Parameters
You configure the tool's parameters in the expandable Parameters section.
| Parameter | Description |
|---|---|
|
Nominal Radius |
Expected radius of the hole. |
|
Radius Tolerance |
The maximum variation from the nominal radius (+/- from the nominal radius). |
|
Partial Detection |
Enable if only part of the hole is within the measurement region; the centre of the hole must be in the measurement region to be located. If disabled, the hole must be completely in the region of interest for results to be valid.
|
|
Use Depth Limit |
When Use Depth Limit is enabled, data below the value set in Depth Limit (relative to the surface) is excluded from the |
|
Use Region |
When enabled, displays Region parameters (see below). When disabled, the tool uses all data. |
|
Region |
The region to which the tool's measurements will apply. For more information, see Regions. |
|
Use Reference Region |
When enabled, displays additional settings to let you set a reference region (see below). |
|
Reference Region |
The tool uses the reference regions to calculate the Z position of the hole. It is typically used in cases where the surface around the hole is not flat.
When this option is set to Autoset, the algorithm automatically determines the reference region. When the option is set to 1 Region or 2 Regions, you must manually define the reference regions. The location of the reference region is relative to the detected center of the hole and positioned on the nominal surface plane. When Reference Region is disabled, the tool measures the hole's Z position using all the data in the measurement region, except for a bounding rectangular region around the hole. |
|
Tilt Correction |
Tilt of the target with respect to the alignment plane. Autoset: The tool automatically detects the tilt. Custom: You must enter the X and Y angles manually in the X Angle and Y Angle parameters (see below). |
|
X Angle Y Angle |
The X and Y angles you must specify when Tilt Correction is set to Custom. You can use the Surface Plane tool's X Angle and Y Angle measurements to get the angle of the surrounding surface, and then copy those measurement's values to the X Angle and Y Angle parameters of this tool. |
|
External ID |
The external ID of the tool that appears in GoHMI Designer. For more information, see GoHMI and GoHMI Designer. |
 .
.
Outputs
All tools provide measurements, geometric features, or data as outputs.
Outputs section with a measurement expanded to show user-configurable decision min/max fields and an external ID
You configure the Min and Max parameters by expanding the measurement in the Outputs section. In order for a measurement to return a Pass decision, the measurement must be between maximum and minimum values; the range is inclusive.
| Measurement | Illustration |
|---|---|
|
X Determines the X position of the hole center. |
|
|
Y Determines the Y position of the hole center. |
|
|
Z Determines the Z position of the hole center. |
|
|
Radius Determines the radius of the hole. |
|


| Type | Description |
|---|---|
| Center Point |
The center point of the hole. The Z position of the center point is at the Z position of the surrounding surface. |
|
|
For more information on geometric features, see Geometric Features. |